Modern vehicles rely on interconnected networks to operate electronic systems efficiently. While high-speed Controller Area Network (CAN) handles critical engine, transmission, and drivetrain communications, low-speed networks such as Local Interconnect Network (LIN), J1850, and K-Line manage smaller body-related systems and diagnostic access. Understanding how these networks operate, their voltages, and signaling patterns is essential for accurate troubleshooting and repair.
Voltage Differential
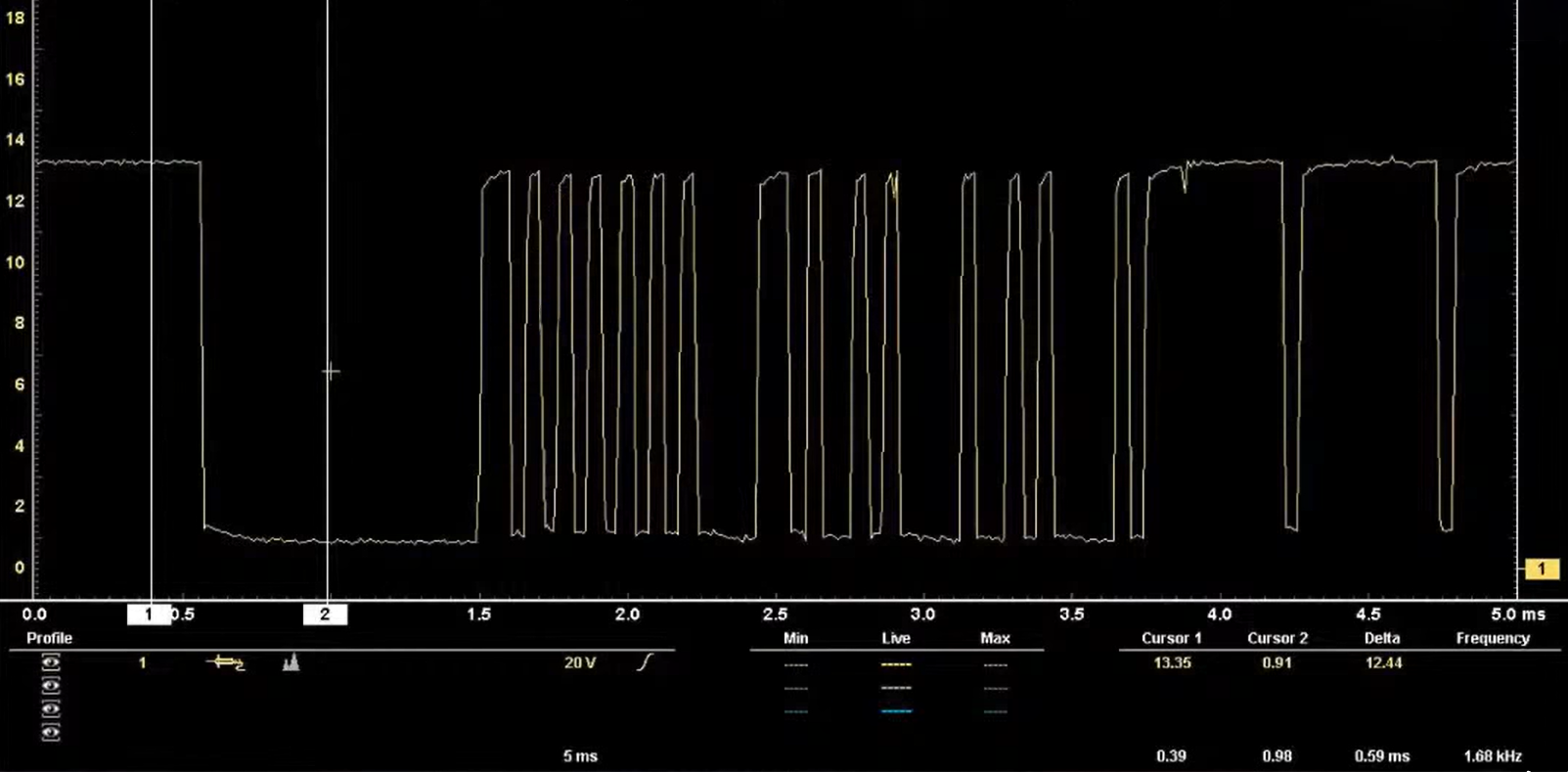
All networks operate on a voltage differential—the difference between a high and low voltage level—which represents data signals. For example, on a LIN bus, the module operates on the high side at 13.35 V and pulls down to 0.91 V on the low side. The differential of these values, around 12.44 V, forms the basis for reliable communication.
Data Link Connector
The vehicle’s diagnostic link connector (DLC) provides access to multiple networks:
Testing
Using a breakout box, technicians can quickly monitor all 16 DLC pins, check for shorts, reversed polarity, and live voltage readings. For example, CAN testing requires connecting to terminals 6 and 14. Tools such as the Blue-Point® EECTBOB simplify access to all pins, eliminating guesswork and speeding up diagnostics.

Low speed networks: J1850
Before LIN, many manufacturers used J1850 as a low-speed communication network. Although largely replaced by CAN, J1850 is still found on older vehicles. It manages functions that do not require high throughput, such as central locking, lighting control, HVAC panels, instrument clusters, and alarm modules.
Two formats exist:
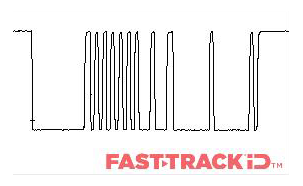
- J1850 VPW: single-wire, 10.417 Kbit/s, 7 V differential
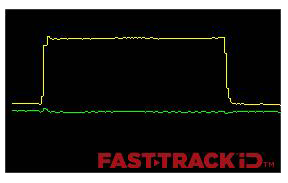
- J1850 PWM: dual-wire, 41.6 Kbit/s, 5 V differential
Waveforms demonstrate that the two PWM lines mirror each other throughout each packet. For example, the high side of packet 1 reads 4.53 V while the low side drops to 0.55 V; packet 2 ranges from 5.04 V down to 0.22 V. This mirroring confirms the bus is switching correctly, showing the network is active and not shorted.
- Technicians will still encounter J1850 on pre-2008 OBD systems. Key points: slow communication speed makes scope captures easy, and intermittent faults often stem from poor grounds, shared grounds, or corrosion.
J1850 VPW bus
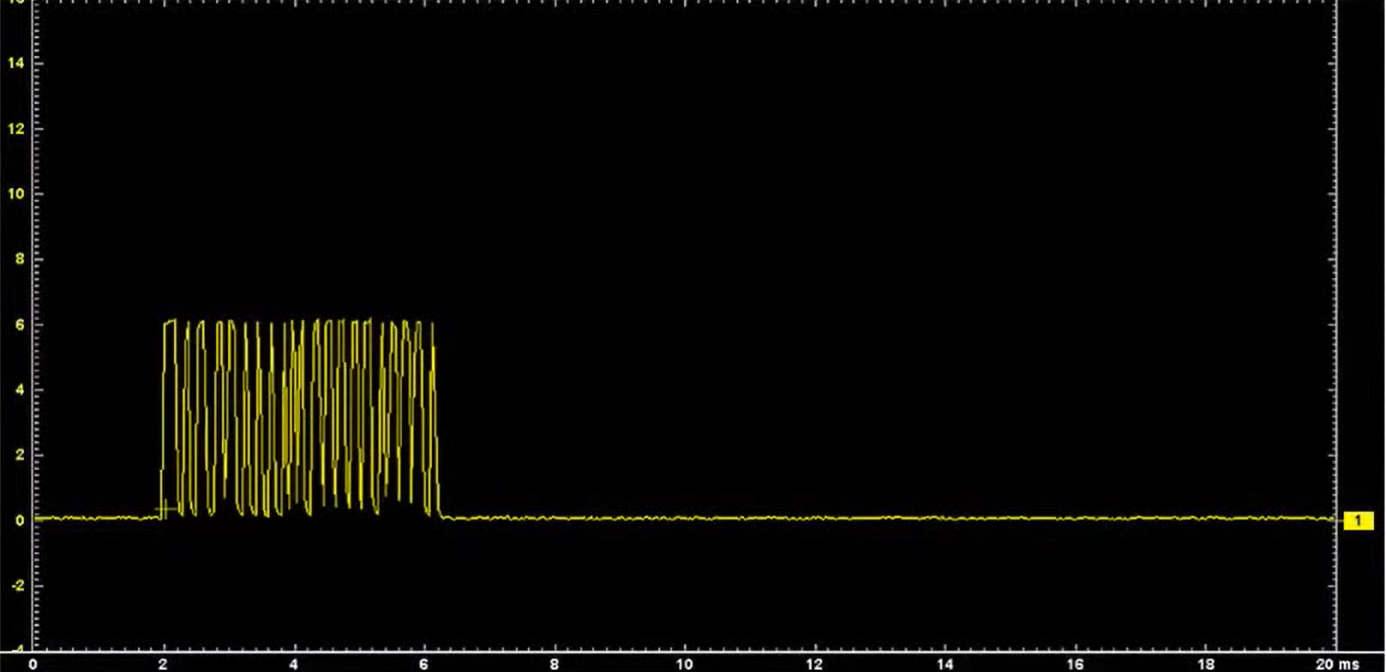
J1850 Variable pulse width waveform
J1850 PWM bus
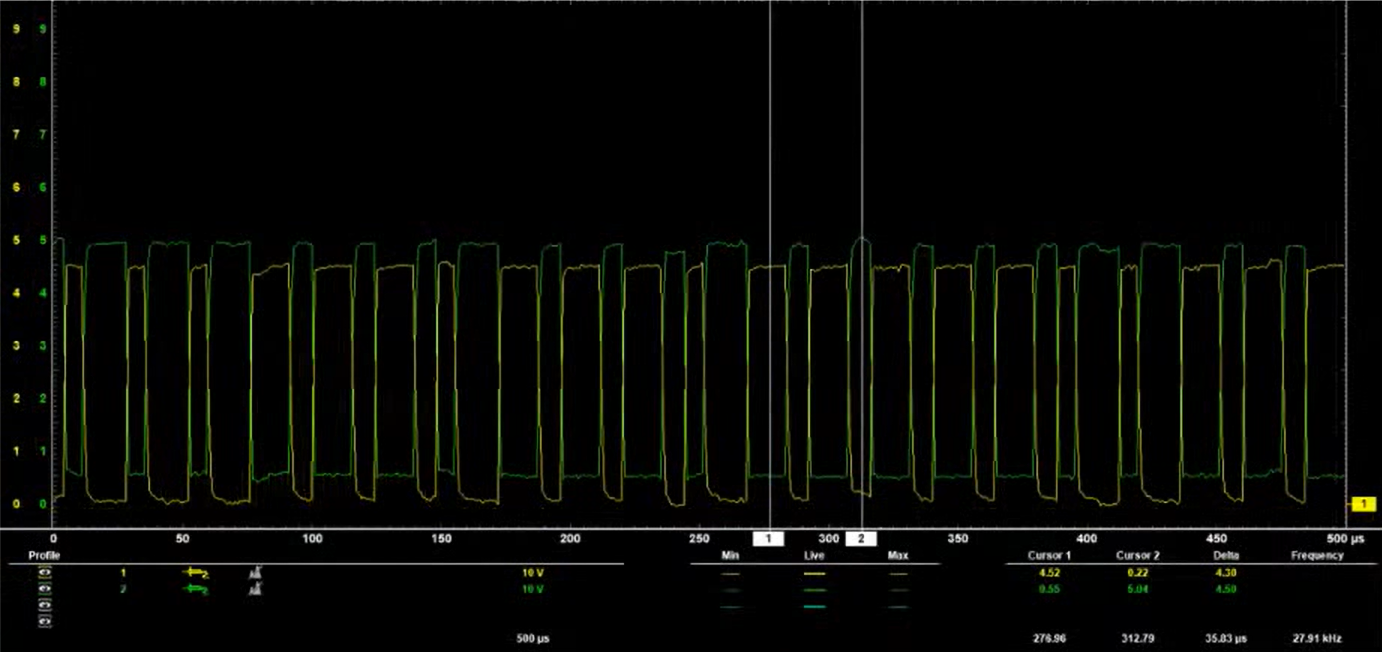
J1850 Pulse width modulation waveform
The two signal lines mirror one another throughout each data packet. In the first packet, the high side measures around 4.53 V while the low side drops to roughly 0.55 V, and in the second packet the values shift slightly, ranging from about 5.04 V down to 0.22 V. These variations are expected due to circuit tolerances, but the consistent opposite movement of the two lines confirms that the bus is switching correctly and that the network is not shorted, providing a reliable indication that the communication is active and functioning as intended.
Both formats use voltage transitions to represent logic states. As a low-speed network, timing was less critical than CAN, so modules could be produced at lower cost. However, as vehicles increased in complexity, J1850’s capacity became restrictive and eventually it was phased out in favor of CAN.
Applications Today:
Technicians will still encounter J1850 buses during diagnostic and electrical repairs on older vehicles. Useful points to remember:
K-Line
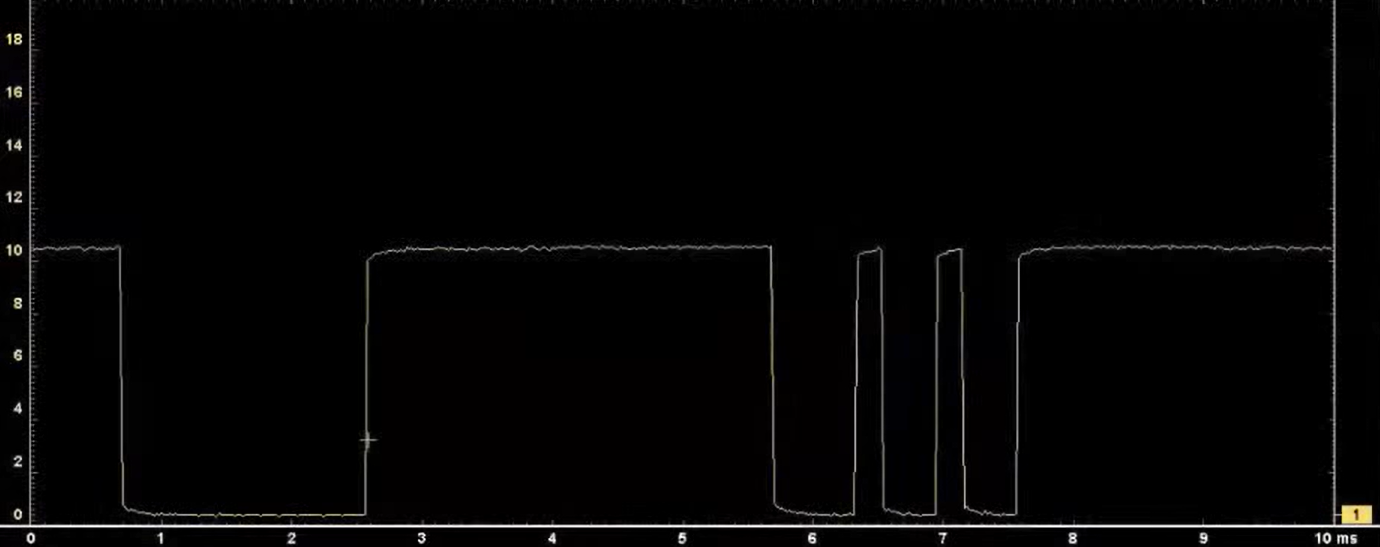
K-Line, defined in ISO 9141 and ISO 14230, is a single-wire serial diagnostic link with a 10.65 Kbit/s rate and 10 V differential. Some manufacturers, such as Subaru, used K-Line into the 2010’s for module diagnostics. Its point-to-point design is slower than CAN, requiring precise wake-up procedures.
LIN Bus – Local Interconnect Network
LIN was developed as a simple, low-cost alternative to CAN for localized body functions. It consists of a single master node (typically an ECM) and up to 15 slave nodes. LIN can communicate with CAN via the master, enabling integration across network types.
-
Applications: body and comfort functions, including mirrors, seat motors, window regulators, steering wheel switches, and door locks.
Messages use dominant and recessive bits, similar to CAN. LIN’s low bandwidth is ideal for localized systems where real-time performance is not critical.
LIN is used wherever the bandwidth and versatility of CAN are not required. A LIN bus consists of a single wire with a transmission rate of 20 Kbit/s and uses a 12-volt differential. Timing is controlled by the master node, meaning slave nodes do not require quartz crystal oscillators, lowering manufacturing costs.
This is typically used for body communications such as ON/OFF communications.
-
Steering wheel: cruise control, wiper, turn signals, climate control, radio
-
Door: mirror, central ECU, mirror switch, window controls, seat control switch, door lock
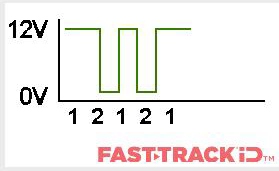
Just as with CAN bus the messages are constructed using dominant and recessive bits. The bus recessive state is a logic 1 bit and represented by a bus voltage of 12 volts. The dominant state is a logic 0 and represented by a bus voltage of 0 volts.
-
Recessive state
-
Dominant state
LIN signal has a high side of 13.35-volts
and a low-side of 0.91 volts
LIN ensures reliable control of these systems without high bandwidth or real-time processing, simplifying the vehicle’s electrical architecture. Its low-cost design allows manufacturers to use dedicated modules for localized tasks, such as all components in a driver’s door, without overcomplicating the network.
Practically, CAN offers several advantages in the workshop. It supports complex system interaction, enables fast diagnostic access, and reduces wiring demands by allowing modules to share data rather than running individual signal wires to each component. Fault-finding often focuses on voltage levels, termination points and checking for corrupted messages. When a CAN fault is present, multiple systems may report communication errors, making a methodical approach essential.
Controller Area Network (CAN)
High-speed CAN uses two twisted wires with a 100–500 Kbit/s transmission rate and a 2–2.5 V differential. It supports multi-master communication with message arbitration, ensuring critical signals are prioritized. Proper termination with 120 Ω resistors at each end of the bus stabilizes the network.

This is a typical known-good CAN signal. CAN low is a mirror image of CAN high. In all waveforms, CAN high is the yellow channel and CAN low is the green channel.
We want to see a flat horizontal line which is the idle voltage, and then packets of data, which are the square waves that represent a round trip for the data (transmit and receive). Each of the modules have quartz crystal clocks inside them and they can change the timings of the packets of data so they align.
Here are examples of known-bad CAN waveforms:
This waveform shows the CAN low signal wire in an open circuit state
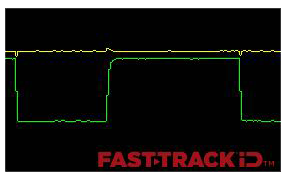
This waveform shows the CAN high signal wire in an open circuit state
Gateway Module
Gateways route data between different CAN networks in the vehicle. When a pre-scan shows that major systems, such as the engine, transmission, body control module (BCM) and brake module—have lost communication while others, like the radio, SRS module and instrument cluster, remain responsive, the pattern suggests a problem with the gateway module. Loss of power, ground or internal failure at this point can prevent entire groups of modules from exchanging data, even though other parts of the network continue to function. Recognizing this behavior allows the diagnostic approach to focus on the network-management unit rather than testing each module individually.
Understanding LIN Module Initialization
LIN module initialization is critical whenever a component is replaced or serviced. It ensures the master ECU correctly recognizes and configures newly installed modules, similar to pairing a Bluetooth® device. Without initialization, modules may not function, and communication errors can arise.
Why Initialization Is Necessary
Module initialization is a critical part of LIN communication, particularly when a new component is fitted during service or repair. The process allows the master ECU to identify the newly installed slave device, assign it a valid node address (NAD) and configure its communication parameters. Essentially, initialization acts as a discovery and pairing procedure, ensuring the new module integrates correctly with the vehicle’s control system.
What Happens During Initialization
Initialization is typically performed using a diagnostic scan tool, which sends LIN-specific commands and monitors the responses from the module to confirm proper integration. The procedure generally follows these steps:
-
Wake-Up and synchronization: activate and align all LIN nodes.
-
Discovery: query connected devices to determine their type, function, and capabilities.
-
Configuration: assign a new node address (NAD) and frame IDs.
-
Verification: test communications to ensure successful pairing.
-
Schedule update: update the internal message schedule to include any new frames.
Practical Example – Ford Bronco – LIN New Module Initialization

In the latest Snap-on® diagnostic software release, LIN module initialization has been extended to 2021 and newer Ford Bronco models. This functionality enables:
Technicians can now quickly complete LIN initialization on the Bronco, ensuring new mirrors, motors, or sensors communicate correctly with the master node, reducing diagnostic time and maintaining vehicle reliability.
Before performing this procedure:
Operational Steps:
1. From the vehicle systems menu, select body control module under body controls
2. Select functional tests → special functions → LIN new module initialization
3. This procedure will configure all BCM LIN nodes, including rear-view camera, intrusion sensor, rain sensor module and battery monitoring system
4. Select Continue
5. This procedure will configure all BCM LIN nodes such as rear-view camera, intrusion sensor, rain sensor module and battery monitoring system.
6. Set the ignition switch to ON (position 1)
7. The scan tool will run an approximately 15-second countdown to reinitialize the modules
8. Procedure complete
Don’t Skip Initialization
Technicians often access LIN networks via the DLC or a breakout box, monitoring voltages with a scope where necessary. A clear understanding of network topology, node roles and expected voltage differentials is essential for effective troubleshooting.
Key Practical Points:
Common Pitfalls and Issues if Initialization is Skipped:
Failing to perform LIN module initialization can prevent the master ECU from recognizing new or replaced slave modules, causing communication errors and improper system behavior. Typical issues include:
-
Devices not responding, such as mirrors, window motors, seats, rear-view cameras, or climate controls
-
Communication malfunction codes: Generic U-series codes indicating LIN bus issues, such as U1008, U1112, U150B, U150C, U1511, U1512, U1514, U1515. Specific examples include U0215 (P/W SW (DR) LIN timeout), U0231 (rain/light sensor LIN timeout), and U1109 (Column SW LIN timeout)
-
“No Response” or “Lost Communication” Codes: Indicate that the master module did not receive expected data from an uninitialized slave node within the timeout period. Examples include B2786 (no response from steering lock ECU), B2789 (no response from ID BOX) and B278C (lost communication with power source control)
LIN module initialization restores proper communication between the master ECU and newly installed slaves, ensuring full system functionality and preventing diagnostic errors. Understanding and completing this process helps technicians perform accurate repairs, avoid unnecessary rework, and maintain vehicle reliability.
Conclusion
Understanding vehicle networks and LIN module initialization is essential for modern diagnostics. Snap-on® scan tools allow technicians to reprogram, initialize and calibrate components efficiently, including the latest LIN updates for vehicles such as the 2021+ Ford Bronco. Staying current ensures reliable repairs, faster turnaround times and improved customer satisfaction.
Out-of-date car diagnostic software can limit coverage and prevent access to secure gateway vehicles. Each Snap-on® software release adds new functionality, updated calibration procedures, and vehicle coverage, making LIN and other network diagnostics faster, safer, and more reliable. Staying current reduces trial-and-error diagnostics and ensures technicians can work confidently on modern vehicles.
Explore the Software Features Guide and discover how staying current unlocks the full potential of your diagnostic platform.
Supporting Visuals & Reference Links
LIN Module Initialization on Ford®
Data Bus Testing and Diagnosis Part 1 - Snap-on Live Training
Data Bus Testing and Diagnosis Part 2 - Snap-on Live Training
FAQ’s
1. What is the difference between high-speed and low-speed vehicle networks?
High-speed networks, such as CAN, manage critical systems including the engine, transmission, and safety modules, operating at fast data rates (100–500 Kbit/s) with message arbitration. Low-speed networks, such as LIN, J1850, and K-Line, control body electronics and comfort systems that do not require rapid communication, operating at slower speeds (10–41 Kbit/s). These networks simplify wiring and reduce component cost. Knowing which network supports which function helps technicians focus diagnostics and avoid unnecessary component replacement.
2. How do voltage differentials indicate network health?
All vehicle networks operate on a voltage differential between high and low signal lines. Correct differential voltages (e.g., ~12 V on LIN or 2–2.5 V on CAN) show the network is communicating correctly. Deviations can indicate issues such as open circuits, shorts, or poor grounds. Technicians use oscilloscopes or breakout boxes to monitor signals in real time.
3. Why is LIN module initialization important?
LIN module initialization ensures the master ECU recognizes new or replaced slave nodes, assigns Node Addresses (NADs), and configures communication schedules. Without this step, modules such as mirrors, window motors, or sensors may not respond, generating U-series fault codes and causing misdiagnosis. Using a car diagnostic tool to follow the proper initialization procedure restores reliable communication.
4. How do gateways affect data communication between networks?
Gateways route data between different vehicle networks. If a pre-scan shows some systems losing communication while others remain responsive, the gateway module may be at fault. Issues such as loss of power, ground, or internal failure at the gateway can prevent multiple modules from exchanging data, so understanding its role allows technicians to target diagnostics efficiently.
5. Can older vehicles still use J1850 or K-Line networks?
Yes. J1850 (VPW or PWM) is commonly found on pre-2008 OBD-II vehicles for body systems like lighting, locks, and HVAC, while K-Line, a single-wire diagnostic bus, remained in use by some manufacturers into the 2010s. These slower networks are easier to capture on a scope, but intermittent faults often arise from poor grounds, shared grounds, or corrosion, requiring careful inspection.